О ПРИНЦИПЕ ВИБРАЦИОННОГО
ПЕРЕМЕЩЕНИЯ ГРУЗОВ
Калиниченко Р.С., Опалько А.А., студенты,
Руководитель – доц. Стегниенко А.П.
Донецкий национальный технический университет
Источник: Калиниченко Р.С. О ПРИНЦИПЕ ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ ГРУЗОВ/Р.С.Калиниченко,А.А.Опалько,А.П.Стегниенко //Донецк, 2008г.—с.с.54-56
Колебания в машинах имеют
полезное применение в тех случаях, когда колебания (по другой терминологии — вибрация) используются для выполнения
технологического процесса или для его интенсификации, или для повышения
качества выполняемой работы. Соответственно вибрационной
машиной называется машина, исполнительному органу которой сообщают вибрацию
для осуществления или интенсификации выполняемого процесса или повышения
качества выполняемой работы.
Вибрационная машина,
предназначенная для транспортирования грузов или сыпучих материалов, называется
вибрационным транспортером.
Действие вибрационного
транспортера основано на том, что рабочий орган машины в начале и в конце
каждого цикла колебаний занимает одно и то же положение, а транспортируемый
груз в каждом цикле продвигается вперед относительно рабочего органа. В
безударных вибрационных транспортерах это продвижение происходит без удара о
рабочий орган. В простейшем безударном вибрационном транспортере груз массой m
лежит на плоскости рабочего органа машины, который совершает горизонтальные
колебания с размахом S (рис. 1).
Рис.1
Груз прижат к плоскости силой
тяжести mg, которая вызывает силу трения, препятствующую
перемещению груза относительно рабочего органа. Максимальное значение силы
трения равно fmg, где f — коэффициент трения покоя. Если принять коэффициент трения движения равным коэффициенту трения
покоя, то при относительном перемещении груза по плоскости сила трения
сохраняет постоянное значение, равное fmg, и основное уравнение
динамики материальных точки в проекциях на ось x имеет вид:
![]()
или
![]() ,
,
где ![]() - ускорение груза.
- ускорение груза.
Отсюда следует, что
отрицательное ускорение груза не может превысить по модулю величины fg,
и если на участке замедления (выбега) рабочий орган будет иметь модуль ускорения
![]() > fg,
то груз в своем движении будет опережать рабочий орган.
> fg,
то груз в своем движении будет опережать рабочий орган.
Пусть, например, рабочий орган
приводится в движение от кулачкового механизма, в котором профиль кулачка
построен по закону постоянного ускорения при равных временах прямого и
обратного ходов (рис. 64, а). При прямом ходе (слева направо) на участке
разбега продолжительностью ![]() ускорение рабочего
органа
ускорение рабочего
органа ![]() < fg,
а на участке выбега продолжительностью
< fg,
а на участке выбега продолжительностью ![]() модуль ускорения
(замедления)
модуль ускорения
(замедления) ![]() > fg,
причем отношение k=
> fg,
причем отношение k=![]() выбирается достаточно большим (k>4). При обратном ходе разбег происходит с ускорением
выбирается достаточно большим (k>4). При обратном ходе разбег происходит с ускорением ![]() , а выбег с модулем ускорения
, а выбег с модулем ускорения ![]() .
.
а)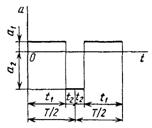 б)
б)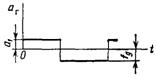
Рис.2
Продолжительности участков
разбега и выбега могут быть выражены через коэффициент k и
период колебаний Т, если принять во внимание систему
уравнений:
![]() ,
, ![]() .
.
Отсюда
![]() ,
, ![]() .
.
Размах колебаний S
можно выразить через период колебаний Т, ускорение ![]() и коэффициент k=
и коэффициент k=![]() , если подставить в выражения для
, если подставить в выражения для ![]() и
и ![]() :
:
![]() .
.
На участке разбега прямого
хода продолжительностью, груз движется вместе с рабочим органом без
проскальзывания, т. е. ![]() (рис. 2,б). На участке выбега груз скользит относительно
рабочего органа, так как модуль его отрицательного ускорения
(рис. 2,б). На участке выбега груз скользит относительно
рабочего органа, так как модуль его отрицательного ускорения ![]() меньше модуля
отрицательного ускорения
меньше модуля
отрицательного ускорения ![]() . Скольжение прекращается, когда по истечении времени
. Скольжение прекращается, когда по истечении времени ![]() скорость груза сравняется по модулю со скоростью рабочего
органа
скорость груза сравняется по модулю со скоростью рабочего
органа ![]() .
.
Для увеличения средней
скорости перемещения груза при тех же значениях ![]() и k
надо увеличить перемещение рабочего органа S. С этой целью обычно вместо кулачкового
механизма используют кулисный механизм с ускоренным обратным ходом. Однако
скорость перемещения груза остается небольшой, и для ее увеличения переходят к
вибрационным транспортерам с подбрасыванием груза.
и k
надо увеличить перемещение рабочего органа S. С этой целью обычно вместо кулачкового
механизма используют кулисный механизм с ускоренным обратным ходом. Однако
скорость перемещения груза остается небольшой, и для ее увеличения переходят к
вибрационным транспортерам с подбрасыванием груза.
Список источников:
1.Левитский Н.И.
Колебания в механизмах: Учеб. Пособие для втузов. – М.: Наука. Гл. ред.
физ.-мат. лит., 1988. – 336 с.